U-Net Road Segmentation
This project developed a road segmentation model using the U-Net architecture for autonomous driving applications
Problem Statement
Analysis and Insights
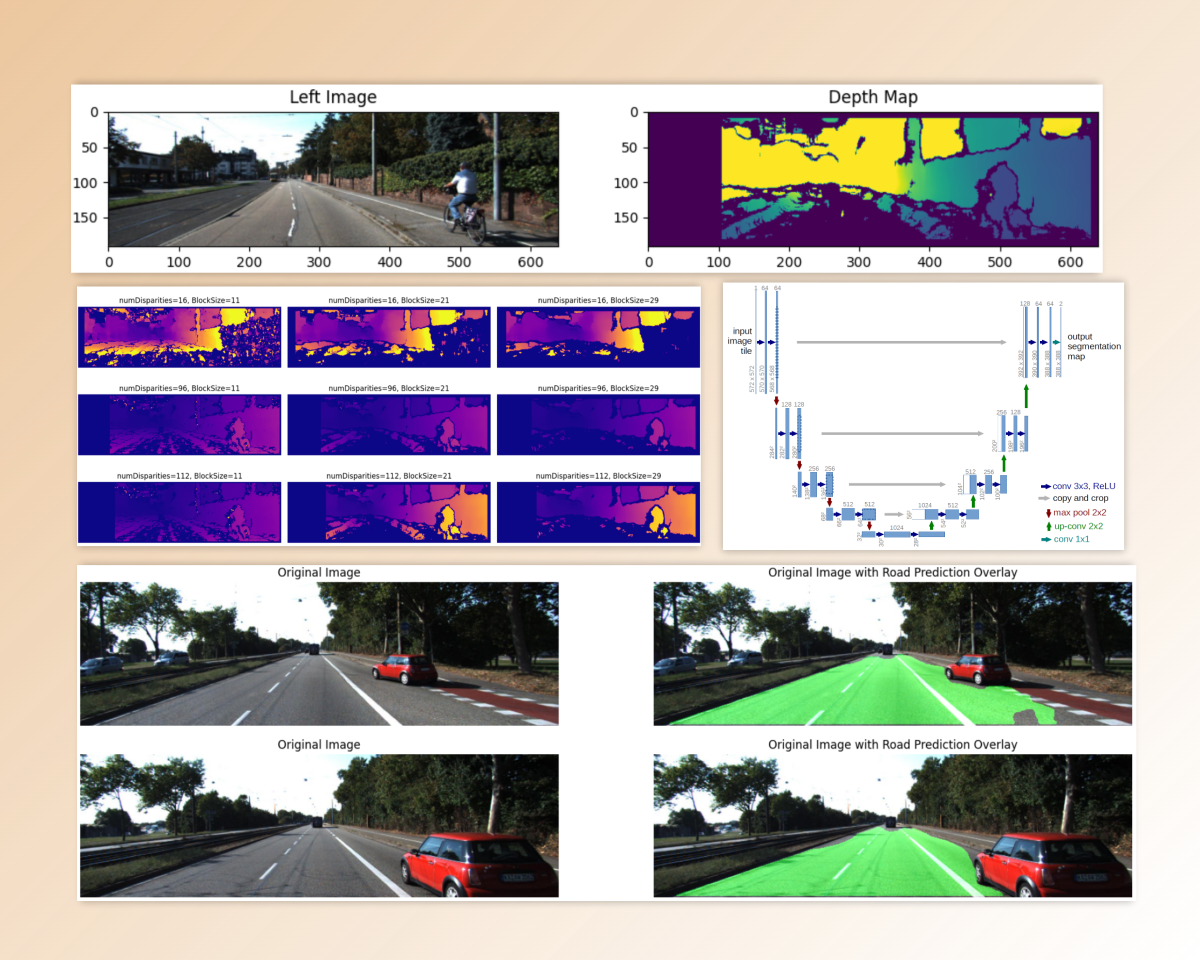
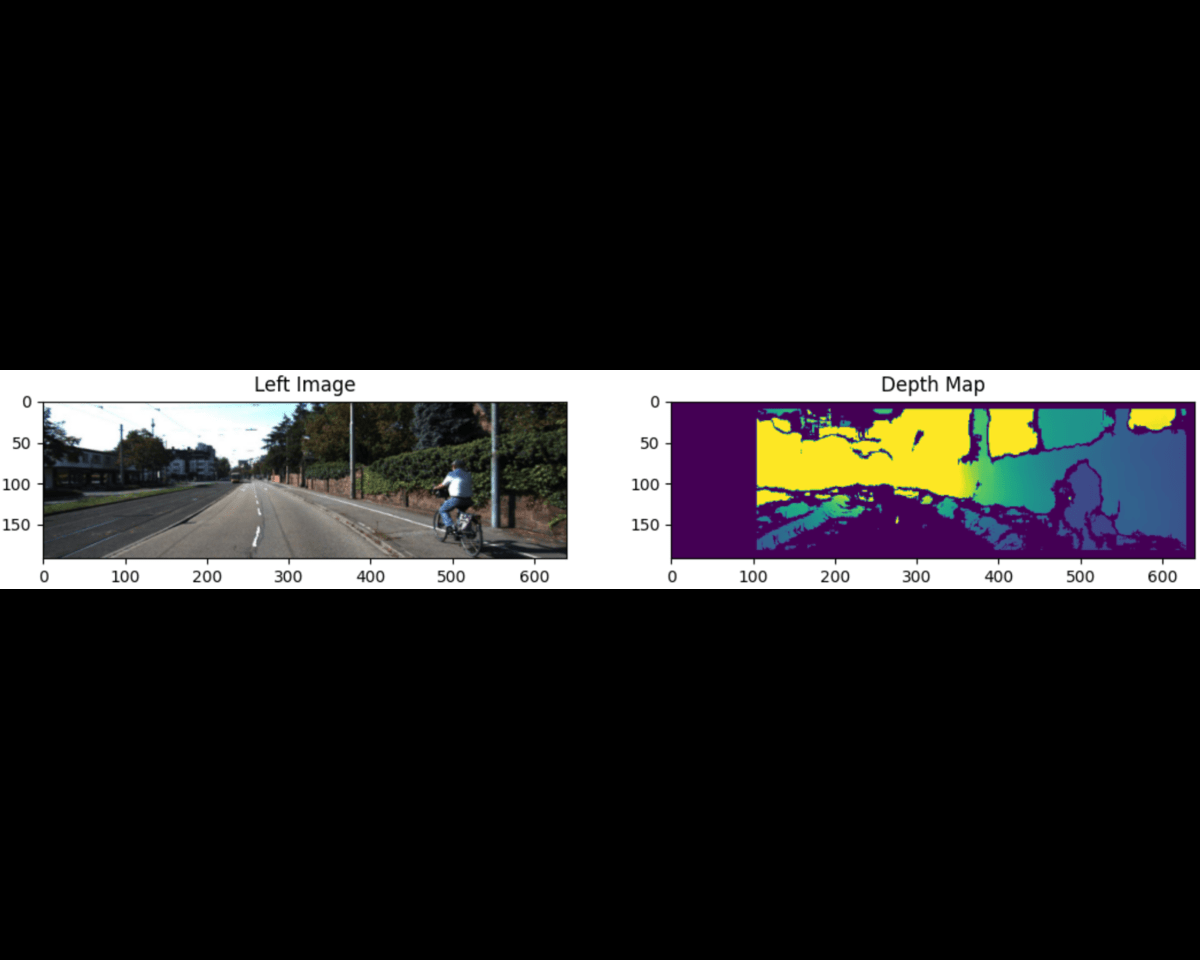
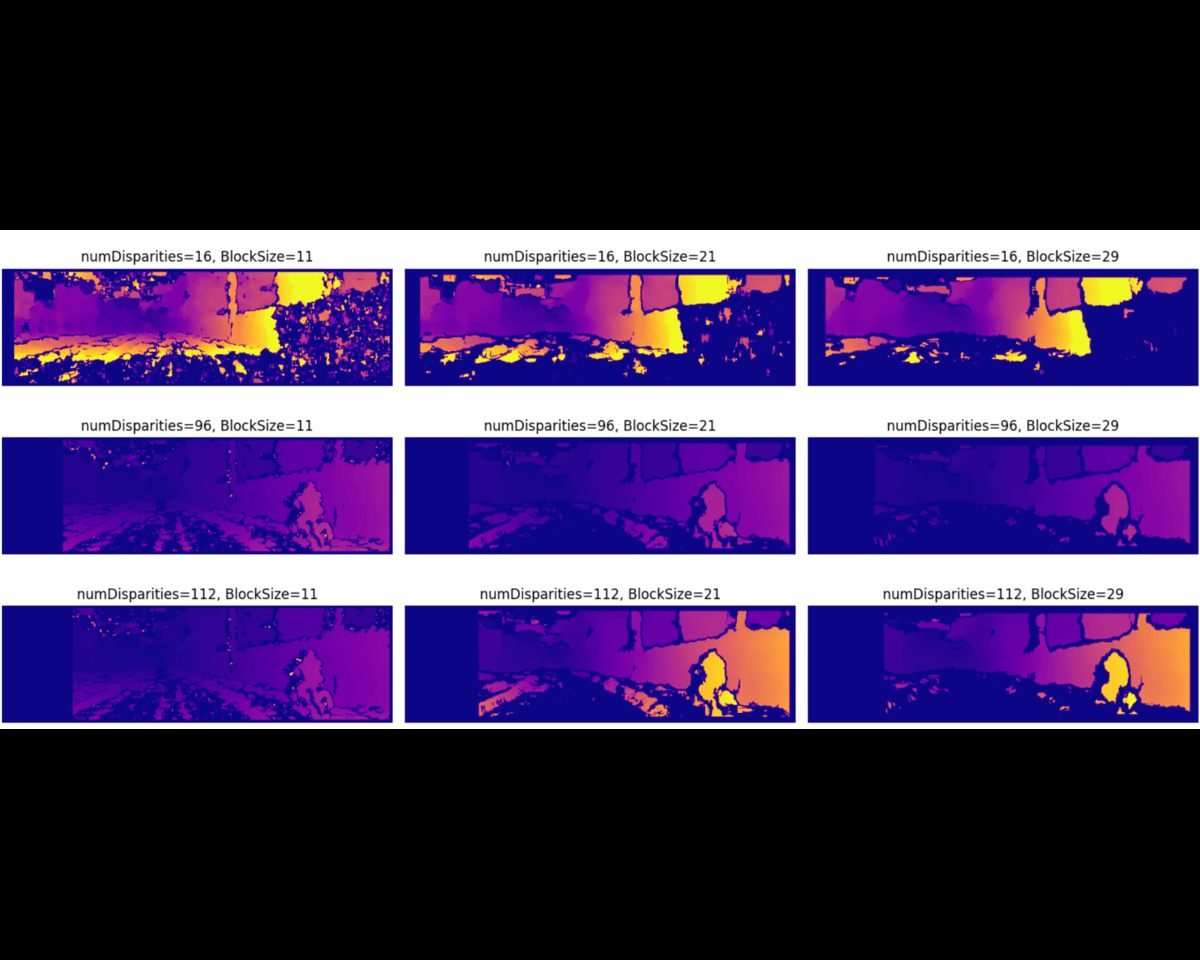
3D Features
- Implementation of depth map fusion significantly improved segmentation accuracy.
- Achieved higher pixel-accuracy, Intersection over Union (IoU), and Dice Coefficient compared to the base model.
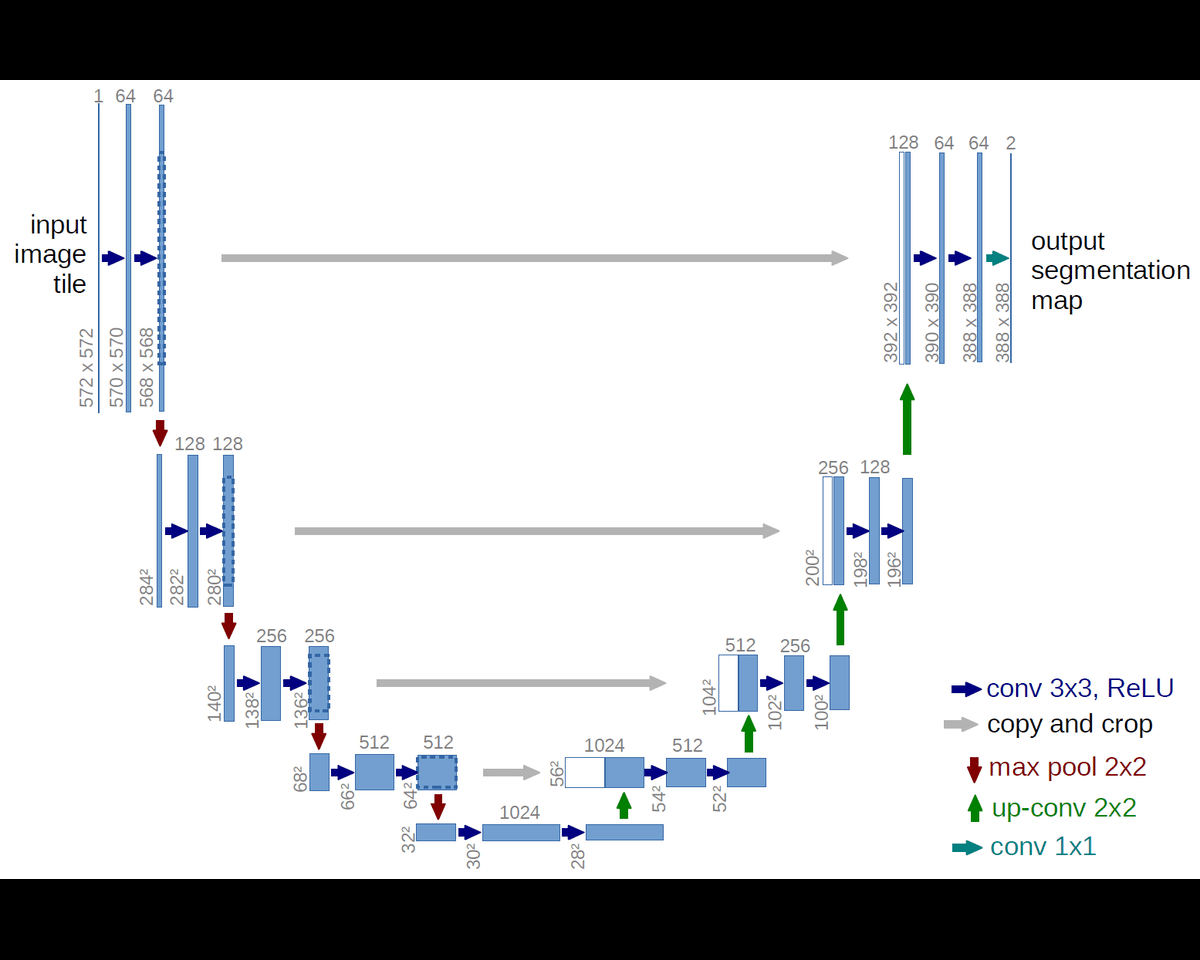
U-Net Model
- The U-Net architecture proved highly efficient for road segmentation tasks requiring precise localization.
- Its design facilitated detailed and accurate segmentation outputs by effectively using skip connections and a deep learning framework.
Data Augmentation and Model Robustness
- Employed data augmentation techniques like horizontal flipping to enhance model training.
- Augmentation helped the model generalize better across different driving contexts, reducing overfitting.
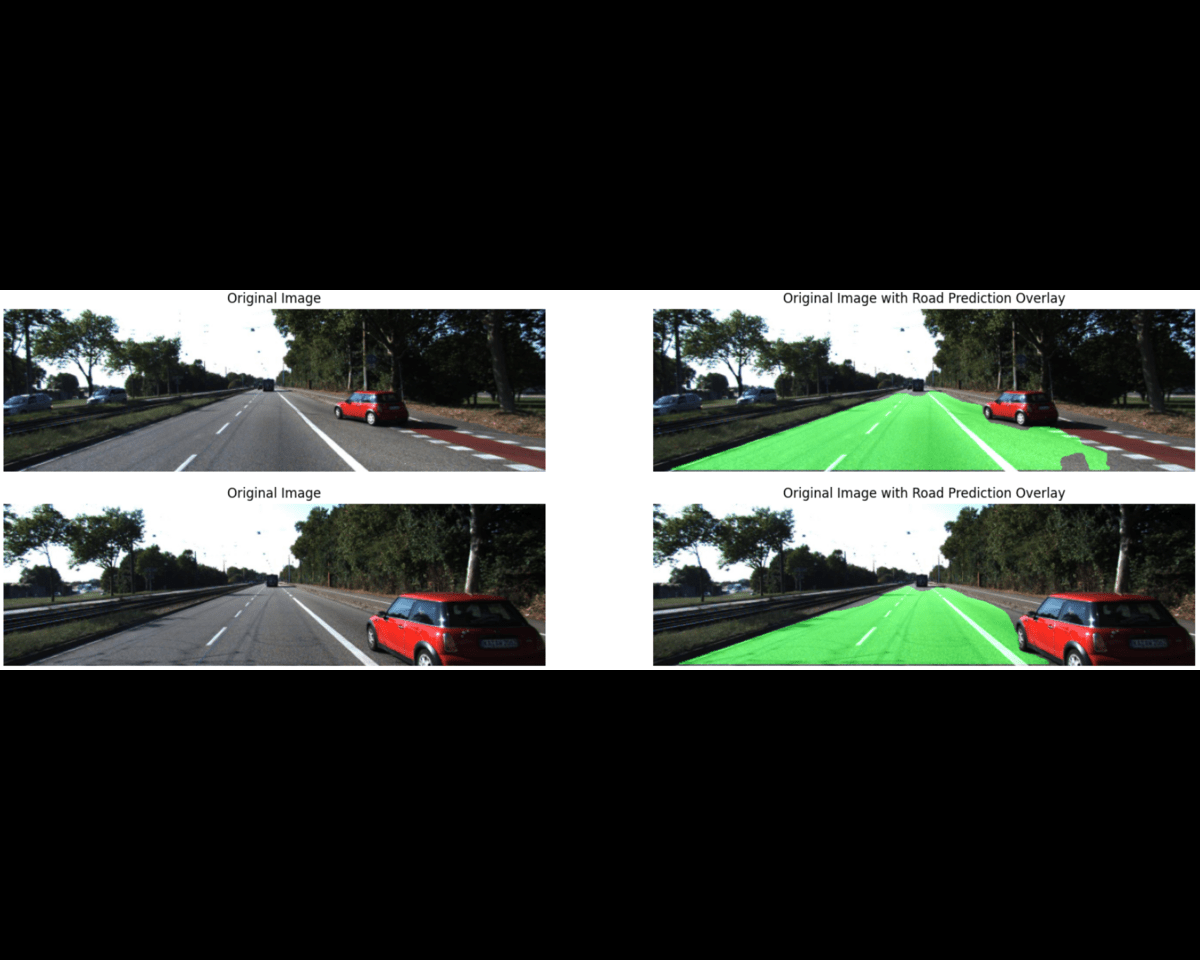
Comparison with Base Model
- Fused model outperformed the standard model in all key metrics, underscoring the benefit of incorporating depth data.
Challenges in Lane Marking Detection
- Encountered difficulties in classifying lanes with distinct markings due to high contrast.
- Proposed solutions include expanding the dataset to encompass a wider variety of lane markings and traffic scenarios.
Visualization of Model Performance
- Employed 3D plotting to visually demonstrate the model's ability to detect and plot road surfaces.
- The 3D point cloud visualizations highlighted the practical application of the model in real-world scenarios.
Tech Stack
 Google Colab
Google Colab© 2024 - Ian Quan